Disclaimer :
Cet article reste intéressant pour comprendre le fonctionnement, mais il date de 2020, une éternité dans le monde de l’informatique.
Les données concernant l’utilisation par les applis ne sont pas nécessairement à jour . Cet article l’est bien davantage et les cible plus précisément :
Plan :
- Introduction et présentation (presque complète) de tous les moteurs
- Extension de fichiers
- Fond de carte
- Données altimétriques
- Revêtement de sol
- IGN
- Google maps (RideWithGps…)
- My Maps
- Yours (Locus Map…)
- GraphHopper (Openrunner, Komoot, AllTrails, OruxMap, Locus Map…)
- OSRM (IGN, OpenStreetMap.org, cycle.travel, MapsMe…)
- BRouter (BRouter, OsmAnd, OruxMap, Locus Map…)
- Boites à outil
Il y a bien des manières et bien des sites possibles pour faire son itinéraire d’un point à l’autre.
On peut faire à l’ancienne en traçant au stabilo sur une carte papier, demander à un moteur d’itinéraire de tout choisir pour nous depuis son départ jusqu’à l’arrivé. Entre les deux le choix est vaste.
Je ne vais donc pas faire un article exhaustif sur la question, il me faudrait quelques décennies, je vais juste vous donner les pistes et les outils que j’utilise (ou que j’ai utilisé) sur le net et exclusivement pour le vélo.
Je fais maintenant quasiment tous mes itinéraires sur Locus Map ou sur le web en utilisant toujours le même moteur d’itinéraire : BRouter , ou en traçant tout moi-même. Mais à chacun ses choix et ses habitudes. Avant de le trouver des méthodes qui me convenaient, j’ai fait comme tout le monde, j’ai testé.
Si vous voulez avoir une idée un peu plus complète des différents moteurs d’itinéraires existants (couverture, options… ) n’hésitez pas à aller visiter cette page:
https://wiki.openstreetmap.org/wiki/Routing/online_routers . S’ils ne sont pas tous présents dans le tableau de comparaison, ils sont tous listés.

Vous pourrez visualiser les options qu’ils offrent (différents choix de routage pour le vélo, en tenant compte du D+ ou pas, pour les aveugles, pour les fauteuils roulant, d’autre sont capables d’éviter les frontières ou une zone particulière…)
Pour les utilisateurs de Locus Map (qui offre le choix entre trois moteurs d’itinéraire : Yours, GraphHopper et BRouter) il peut être aussi utile de savoir quel moteur vous convient le mieux en les testant sur le web.
Pour information, en dehors de Google qui exploite sa propre cartographie et de Garmin , les autres moteurs utilisent quasi tous les données d’OSM (OpenStreetMap) et font des choix entre les différentes possibilités. Ils sont donc TOUS dépendant de la précision de ces données participatives.
Si le moteur d’itinéraire vous envoie sur une route nationale alors que vous êtes cycliste, l’erreur vient de lui (mauvais choix!) .
S’il vous envoie sur une petite route (qui est cartographiée comme telle sur OSM) qui s’avère être un chemin impraticable le choix est bon, c’est OSM qui a tort.
Le mieux est alors de corriger OSM pour améliorer le fond de carte : https://learnosm.org/fr/
(pour corriger les revêtement de sol c’est par ici :
https://biclousetbidouilles.com/corriger-le-revetement-de-sol-dans-openstreetmap/ )
Attention aussi avant de porter un jugement d’apprendre à les utiliser!
Plus un moteur d’itinéraire vous offre de possibilités de profil (vélo rapide, lent, voiture, ferry ou pas…) plus il est compliqué à prendre en main! C’est le cas sur le net, c’est encore plus le cas avec les applications sur téléphone.
OruxMap, OsmAnd ou LocusMap offrent le choix des moteurs d’itinéraire ainsi que leur personnalisation. C’est plus riche mais évidemment un peu plus complexe à prendre en main qu’une appli avec pour seul choix « voiture, vélo ou piéton »….
Les formats de fichiers
Il existe plusieurs possibilités de fichiers pour enregistrer, exporter (ou importer) des données GPS. Et pour les mêmes extensions, plusieurs possibilités de précisions, de métadonnées etc.
Ce sont des fichiers XML , vous pouvez les ouvrir avec un éditeur de texte pour les modifier.
(Pour en savoir plus sur le sujet et si vous voulez savoir la différence entre waypoint, trace ou route allez jeter un œil par là, c’est très bien expliqué : https://www.bel-horizon.eu/la-cartographie/trace-route-waypoint/les-fichiers-gpx.html )
les principaux formats sont :
GPX (Global Positionning XML)
TCX (Training Center XML) qui est le format développé par Garmin
KML est un format Google
KMZ est un fichier KML zippé
FIT est un format Garmin développé en binaire, il prend moins de place, il est surtout utilisé pour les montres.
Le format GeoJson n’est pas à proprement parlé un fichier de données GPS mais un fichier en javascript contenant des données géospatiales.
Il existe sur le net des outils de conversion.
Par exemple GPS visualizer : https://www.gpsvisualizer.com/convert_input
ou GPS babel : https://www.gpsvisualizer.com/gpsbabel/
Sur Locus Map il est très facile d’importer (ou d’exporter) traces et points. Concernant les traces, les fichiers gpx, tcx,mais aussi KML et KMZ sont acceptés aussi bien en export qu’en import. Les fichiers GeoJson ne sont acceptés qu’en import.
Les fonds de carte
Attention!
Un moteur de recherche ne fonctionne pas du tout comme nous! Pour faire notre route manuellement, nous étudions la carte que nous avons sous les yeux et nous l’utilisons pour tracer notre chemin.
Un moteur d’itinéraire n’a pas la même approche: il utilise des bases de données qui n’ont pas forcément de rapport avec la carte affichée sur votre écran.
Une carte Kompass peut être affichée avec des détails de toutes sortes, et le moteur d’itinéraire du site ou de l’appli va utiliser les données libres d’OSRM par exemple.
Les données altimétriques:
Certains moteurs (comme BRouter) tiennent même compte de votre choix (bosse acceptée ou pas) dans la construction de l’itinéraire (voir tableau au dessus), certaines proposent une visualisation par graphique lors de la création de l’itinéraire.
C’est plus ou moins précis selon chaque moteur , et surtout selon certains types de terrains.
En effet, tous les moteurs d’itinéraires utilisent des données libres: celles de la NASA: SRTM, les NED ou d’autres comme les GTOPO …
Je ne saurais que vous envoyer lire cet excellent post de Danklorix déniché sur le forum de Cyclurba qui explique parfaitement pourquoi ces données sont plus ou moins précises :
https://cyclurba.fr/forum/642889/komoot-fiabilitn-dn-niveln.html?discussionID=25870
Les revêtements de sol
Plusieurs moteurs d’itinéraire le proposent. C’est en fait assez anecdotique. En effet s’il y a bien un point qu’il convient d’améliorer dans OpenStreetMap c’est la précision des revêtements de route, piste et chemins!
D’une part cela change très vite (chemin de halage goudronné ou pas lors de la création de voie verte) et cela diffère d’un pays à l’autre : une route kirghize cartographiée comme route principale peut avoir un revêtement bien pire qu’un petit chemin français (que tous les cyclos et cyclotes qui ont maudit la terrible route de Kazarman lèvent le doigt…).
De plus la plupart des petites routes sont cartographiées en utilisant des photos satellites (on voit très bien la route/piste mais pas son revêtement) ou à partir des datas du cadastre qui ne mentionnent pas leur état…
Autant en véhicule motorisé cette donnée peut être fiable (mais quasiment inutile) autant en vélo il vous suffit de rouler un peu sur les petites routes/ pistes/ chemins pour constater que les erreurs sont tellement fréquentes que cette donnée est terriblement aléatoire.
Voilà deux techniques pour nous aider à corriger OpenStreetMap :
https://biclousetbidouilles.com/corriger-le-revetement-de-sol-dans-openstreetmap/
Et l’IGN dans tout ça?
En effet l‘IGN (Institut Géographique National) édite ses propres cartes avec ses propres données cartographiques. Ces cartes remarquables indiquent toujours parfaitement s’il s’agit d’une piste, d’un chemin ou d’une petite route goudronnée, de surcroît l’IGN a ses propres données altimétriques….
Oui mais voilà : son moteur d’itinéraire n’utilise pas les ressources de l’IGN :
https://geoservices.ign.fr/documentation/services_betas/doc-itineraires.html
De l’utilisation des moteurs de recherche par les sites ou les applis
Quelques pistes pour vous y retrouver dans cette masse d’information.
Un moteur d’itinéraire fournit des datas qui vont permettre à une appli (App mobiles) ou à un site web (Web App) de tracer une route.
Mais la facilité et les options possibles pour tracer cette route dépendent de l’appli (mobiles ou web)
Je vais vous lister quelques moteurs qui sont utilisés par plusieurs applis (mobiles ou web) qui proposent des ergonomies complètement différentes avec le même moteur.
Par exemple pour GraphHopper (qui est très utilisé) , vous pouvez l’essayer sur OSM en ligne avec la seule option de traçage Départ/Arrivée
Mais vous pouvez aussi tester GraphHopper sur OpenRunner par exemple qui, lui, va permettre un traçage d’étape en étape en cliquant sur la carte.
Google Maps
J’utilise assez peu (sauf peut être dans Paris ) son moteur d’itinéraire. J’aime beaucoup prendre les chemins , il ne les a forcément beaucoup cartographiés d&ns certaines régions.
(RidewithGPS utilise les données de google pour son moteur de recherche (mais pas forcément pour l’affichage de sa cartographie)
Si vous avez besoin d’exporter une route que vous venez de tracer sur Google Map ce site peut vous être utile :
MyMaps (Google)
Rélie vous en parle beaucoup mieux que moi :
Sachez juste que vous n’êtes pas obligé de convertir pour exporter vos trace (et vos points) sur Locus Map , il accepte parfaitement les fichiers KML et KMZ (aussi bien en import qu’en export.
Tout est conservé, même les icônes que vous aviez si soigneusement choisies 😀
Documentation (mais en anglais : ) https://docs.locusmap.eu/doku.php?id=manual:user_guide:tracks:import
Yours :
(Yet another OpenStreetMap Route Service)
Yours est un moteur d’itinéraire en ligne.
Vous pouvez voir et comparer ses caractéristique ici : https://wiki.openstreetmap.org/wiki/Routing/online_routers
Yours offre trois choix pour le vélo : Bicycle (shortest), Bicycle (fastest), Bicycle (quietest)
Ces choix possibles n’étant pas forcément exploités par les sites ou applications qui l’utilisent.
Il est disponible sur le net ici : http://www.yournavigation.org/ (démonstration) mais en version quelque peu rébarbative ..
C’est un des moteurs d’itinéraire en ligne de Locus Map.
GraphHopper:
Vous pouvez l’utiliser gratuitement sur le site d’OpenStreetMap : https://www.openstreetmap.org/
Pour information Komoot est un forked de GraphHopper : https://libraries.io/github/komoot/graphhopper
Openrunner (gratuit avec une excellente ergonomie en ligne) , OruxMap , AllTrails, Locus Map …utilisent aussi GraphHopper
OSRM :
(Open Source Routing Machine)
C’est le moteur qui est utilisé par nombres de sites. Vous pouvez l’utiliser en ligne: OSRM , chez IGN, OpenstreetMap.org (en plus de graphhopper) , mais aussi chez Cycle travel ou Maps.me
BRouter
Brouter est de loin mon préféré.
Vous pouvez l’utiliser gratuitement sur le net ici : http://brouter.de/brouter-web/
Je vous laisse apprécier les possibilités :

C’est le seul moteur de recherche que je connaisse qui me laisse choisir une route escarpée 😀
Aller sur la droite cliquez sur la clef à molette pour davantage personnaliser votre profil :
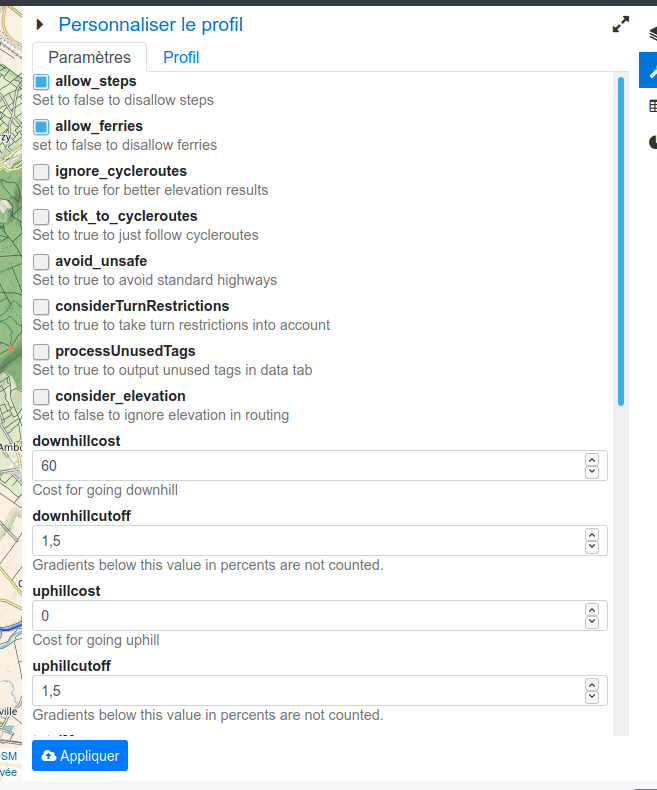
Par contre prenez garde à ne pas faire des itinéraires trop longs. Il est parfois victime de son succès et plante sous le poids des fichiers à traiter…
Pour le tester sur le net (et non en passant par une appli) Linux.org propose un tuto très complet :
Il est accessible sur téléphone avec OsmAnd, OruxMap et LocusMap. Ce moteur a la particularité de fonctionner hors-ligne sur smartphone!
Édité en avril 2021 : BRouter est maintenant intégré directement à Locus Map version 4 , il s’appelle LoRouter mais c’est bien le même 😉 Il permet de faire ses traces HORS-LIGNE sur son smartphone.
Si vous voulez en savoir et apprendre à l’utiliser j’ai écrit un tuto à l’usage des débutant sur le sujet:
Boite à outil :

Gps Visualizer est une boite à outil formidable que je vous laisse explorer.
Pour ma part je l’utilise principalement pour coller plusieurs fichiers (par exemple la Transandaluz récupérée en 8 morceaux, ou encore un itinéraire de course donné en plusieurs fichiers) : https://www.gpsvisualizer.com/convert_input
Pour convertir (y compris les données de GoogleEarth en passant par https://www.gpsvisualizer.com/gpsbabel/
Il peut aussi traiter le format google, le format image (jpg , jpeg..)
Il trouve les points d’élévation manquant : https://www.gpsvisualizer.com/elevation
Si vous voulez un outil (plus) facile pour juste visualiser les traces GPX trouvées sur le net , alors Visu GPX fera très bien l’affaire :

Je remets ici ce site qui est bien utile si vous faites vos itinéraires sur google maps :




J’ajouterai basecamp de carmin. Logiciel gratuit qui permet de bricoler ses gpx comme on veut.
Concernant le moteur d’itinéraires de Google mais il est top à vélo à la campagne car il privilégie souvent les itinéraires à travers champs. Donc top pour les graveleux reloud pour les autres 🙂
C’est parfait si Google vous convient. Mais je ne sais dans quelle région google map aurait mieux cartographié les chemins qu’OSM…
Si c’est le cas , surtout faite le moi savoir et j’irai tout de suite corriger en allant mapper sur osm. 😀
Sinon, cet article n’aborde pas du tout les possibilités logicielles ( ça deviendrait interminable)… Et la linuxienne que je suis n’aurait de toute façon jamais proposé BaseCamp tm : C’est un logiciel propriétaire Garmin non installable nativement sur Linux 🙁
Ma préférence va toujours aux logiciels plus ouverts => Viking (https://sourceforge.net/projects/viking/) ou QMapShak (https://github.com/Maproom/qmapshack/wiki)
C’est bien pour ça que je ne veux pas aborder les logiciels, il y a déjà des querelles de clochers entre les moteurs d’itinéraires, si on aborde la question des systèmes d’exploitations… Je file prendre une bonne goulée de logiciel libre pour m’en remettre 😀
top merci pour les deux projets opensource je ne connaissais pas je vais essayer de ce pas !
Retour de ping : mOI et gOogLe mAp – Biclous et bidouilles
Un GROS gros bravo pour votre article très complet !
Merci beaucoup!
Bonjour, VisuGPX ne permet pas uniquement de visualiser des itinéraires, mais aussi de les tracer, avec au choix les routeurs HERE/IGN/OpenRoute !
Bonjour,
Je n’en ai pas parlé car la version gratuite ne propose aucune option pour le vélo (et un seul moteur qui n’est pas précisé) , j’ai loupé un truc?
Bonjour Marie,
Merci beaucoup pour ton partage, ton blog est exceptionnel.
Quel est l’application Androïd qui intègre le routeur qui intègre le mieux toutes les clefs d’OSM comme smoothness, Tracktype, surface ? Mes genoux te remercieront.
Bonjour et merci pour les compliments.
En fait il n’y a pas de bonnes réponses : les applis utilisent des datas d’OSM pour le revêtement de sol. Or beaucoup de chemins/ pistes/ sentiers ne sont pas renseignés sur ce sujet. Du coup c’est le revêtement de sol par défaut qui est pris en compte.
Le problème ne vient pas des applis qui font juste avec les données dont elles disposent